Wie schon eingangs erwähnt ist das Ziel dieses Projekts die Digitalisierung
einer Modellbahn, in diesem Falle sogar einer Gartenbahn im Maßstab 1:32 (Spur 1, Märklin).
Grade bei einer Gartenbahn ist das Strippenziehen im Garten eine sehr
fehlerträchtige Angelegenheit. Wo man bei den üblichen Tischanlagen einfach unter die
Anlage kriechen und so zur Not einem Draht vom Schaltpult bis zur Weiche folgen kann,
so sieht man im Garten nur ein Stück Draht in einem Loch verschwinden, und muss dann
zusehen, wo es wieder zum Vorschein kommt. Die Erweiterung der Außenanlage um zusätzliche
Weichen zieht dabei größere Verlegearbeiten mit teuren Erdkabeln nach sich.
Und zu allem Übel kann man sein Stellpult auch nicht über Nacht draussen stehenlassen,
sodass man um eine ausgedehnte Steckerbank zwischen Stellpult und Aussenanlage
nicht umhinkommt, mit den üblichen Problemen wie korrodierten Kontakten oder
zuwenig freien Leitungen bei der nächsten Veränderung im Gleisbild.
Abhilfe versprechen die von zahlreichen Anbietern vertriebenen Digitalsteuerungen.
Allerdings haben diese zwei sehr bedeutsame Nachteile: sie sind entweder nur für
den Innenbetrieb und nicht für die Weichenantriebe von Großbahnen geeignet oder
- meistens - unglaublich teuer in der Anschaffung.
|
Um nicht das Rad neu zu erfinden, und um vielleicht zu anderen verbreiteten Digitalsystemen
kompatibel zu bleiben, habe ich an dieser Stelle das Digitalsystem von Märklin zum
Vorbild genommen. Dieses basierte ursprünglich auf dem Encoder MC145026 und dem Decoder
MC145027 von Motorola. Mittlerweile werden allerdings nicht die ursprünglichen -coder
eingesetzt, sondern Spezialchips als De- und ebenfalls Microcontroller als Encoder, das
Format ist jedoch abwärtskompatibel geblieben.
Im Selbstbauprojekt wird logischerweise ebenfalls ein Microcontroller zum Erstellen und
Versenden der Datenpakete dienen, eben in der in der letzten Seite vorgestellten
Hardwarekonfiguration. Als Empfänger dient ein Motorola MC145027. Um die resultierende
Platine so klein wie möglich zu halten, wurde als Leistungstreiber ein L293D von TI verwandt.

|
Der MC145027-Decoder besitzt 5 Adresseingänge sowie 4 Datenausgänge. Die Datenausgänge werden
immer dann verändert, wenn ein neues Datenpaket korrekt empfangen werden konnte, anderenfalls
verbleiben sie in dem Zustand, der vom letzten gültigen Datenpaket hinterlassen wurde.
Der L293-Leistungstreiber besitzt 4 Eingänge, die den Zustand der 4 Ausgänge bestimmen, sowie
2 Enable-Eingänge, die die Ausgänge komplett abschalten. Es ist zu beachten, dass unbedingt die
D-Variante des L293 zum Einsatz kommen muss, da die anderen Varianten keine integrierten
Schutzdioden besitzen und in der vorgestellten Beispielschaltung nicht lange überleben würden.
Um einen LGB-Weichenantrieb
schalten zu können, müssen zwei der Ausgänge des L293 an den Weichenantrieb angeschlossen werden.
|
LGB-Antriebe besitzen keine Endabschaltung, daher müssen die Ausgänge des L293 auf Disabled
gesetzt werden können. Märklin-Antriebe können in dieser Konfiguration ebenfalls betrieben werden,
wenn man zwei der L293-Ausgänge an die Klemmen 1 und 2 anschließt, und die L-Klemme mit Masse
beschaltet.
Daher wurden jeweils zwei L293-Eingänge zusammengeschaltet, und die beiden verbliebenen
Datenpins des Decoders an die Enable-Inputs geschaltet. So ist es zwar nicht mehr möglich,
beide an eine Decoderplatine angeschlossene Weichen gleichzeitig unabhängig voneinander
zu steuern, sondern nur nacheinander oder bei gleicher Stellung,
aber es gibt keinen zusätzlichen Hardwareaufwand und die Ausgänge
sind normalerweise 'richtig' abgeschaltet und nicht nur auf
gleichem Potential.
|
|
Weiterhin befinden sich auf der Platine ein paar Widerstände und Kondensatoren an den
Anschlüssen R1, C1 und R2/C2, die die Zeitbasis für den Decoderchip bestimmen. Daher
sind die angegebenen Werte unbedingt einzuhalten. Der Rest der Platine wird
von der Spannungsversorgung eingenommen, bestehend aus einem kleinen Brückengleichrichter
im DIL-Gehäuse, einem 78L05 zur Spannungsregelung und ein paar Kondensatoren zur
Stabilisierung der Spannungen. Den 78L05 kann man auch durch eine Zener-Diode mit
Vorwiderstand ersetzen, allerdings würde diese Kombination um einiges mehr Strom benötigen
und daher heißer werden als der 78L05.
Gewöhnungsbedürftig ist die Beschaltung der Adresspins. Um Bauteilbeinchen einzusparen,
verwendet Motorola beim MC14502x einen kleinen Trick: dreiwertige Logik mit den Zuständen
0 (GND), 1(Vcc) und 2 (unbeschalteter Pin). Daher lassen sich mit den 5 Adresspins 3^5=243
verschiedene Adressen einstellen. Weil an jeder Decoderadresse zwei Weichen hängen können,
sind also in dieser Konfiguration 486 Weichen betreibbar, was für die meisten Modellbahnen
ausreichen dürfte.
Die von Märklin vertriebenen Weichendecoder verwenden einen Demultiplexer
an den Datenpins und erhöhen damit die Anzahl der an eine Decoderadresse anschließbaren
Weichen nochmals, da dies aber zusätzlichen Hardwareaufwand ohne
praktischen Nutzen für die meisten Anlagen bedeuten würde, wurde hier davon
abgesehen.
|
Sollen Märklin- und Selbstbaudecoder gemeinsam an einem Kabel betrieben werden,
ist jedoch diese andere Belegung der Adresserweiterung zu berücksichtigen, um nicht aus Versehen
dieselbe Hardwareadresse mehrfach zu belegen.
Auf der Platine werden die Adressen durch Drahtbrücken 'mit dem Lötkolben' festgelegt, da es ja
nicht notwendig ist, eine einmal eingestellte Adresse jemals wieder zu ändern.

Um die Platine vor Nässe zu schützen, sollte man sie am besten mit irgendetwas eingießen.
Wenn man grade nichts besseres zur Hand hat, kann dies auch mit Schmelzkleber erfolgen. Die
Platine erwärmt sich im laufenden Betrieb niemals so stark, dass der Schmelzkleber flüssig würde.
Die pralle Sonne um 12 Uhr Mittags im August stellt dagegen eher eine Gefahr für eine
Schmelzkleber-Umhüllung dar, darum sollte man so behandelte Platinen besser schattig unterbringen.
|
|
Die Software für die Signalerzeugung gliedert sich in zwei Teile:
zum einen in eine Funktion zum Senden der Daten mittels des
L298 auf der Platine zum '100 Watt'-Projekt, zum anderen in die
Berechnung der auszugebenden Daten.
|
Zunächst die Senden-Funktion:
Der MC145027-Decoder erwartet seine Daten in nebenstehend dargestellten
Pulsen codiert, die
jeweils die 3 möglichen Zustände 0, 1 und 2(Offen) abbilden.
Die kurzen Pulse haben eine Dauer von 13 us, die langen eine
Pulsdauer von 91 us. Jeweils zwei kurze und zwei lange je zweimal
ergibt eine Gesamtdauer von 208 us. Glücklicherweise ist der
Decoder nicht besonders anspruchsvoll, was die genaue Einhaltung
des Timings betrifft, da das Timing im Decoder anhand eines von
Kondensatoren mit miserablen Toleranzen getakteten Oszillators
ermittelt wird.
|
|
|
Gesendet werden 9 solcher Pakete. Die ersten 5 bestimmen die Adresse,
die letzten 4 die Daten, wobei die Datenpakete nur den Zustand
0 oder 1 haben dürfen. Zur Erhöhung der Störsicherheit wird dieser
Datenstrom zweimal hintereinander mit ca. 300 us Abstand
verlangt, um eine Reaktion auszulösen. Um wirklich auf Nummer Sicher zu gehen,
wird hierbei der Datenstrom gleich viermal hintereinander gesendet.
|
Am besten lässt sich so ein Datenstrom als 18 Bits auffassen, von denen
jeweils zwei zu einem 0/1/2-Paket gehören. Da der MCS-51 Befehlssatz
leider keine indirekte Adressierung auf Bitebene bietet, kommt man
nicht umhin, dafür gleich 18 Bytes zu verwenden, will man mit einer
Schleife arbeiten. Und so sieht die Sende-Funktion aus:
|
CU_OUTR EQU P1.6 ; Die Eingänge des L298
CU_OUTB EQU P1.5
CU_EN EQU P1.7
SENDDATA0 DATA 010h ; A0
SENDDATA1 DATA 011h
...undsoweiter...
SENDDATA16 DATA 020h ; D3
SENDDATA17 DATA 021h
send:
call putOutData ; senden
mov a,#255
call F_wait_u ; warten
call putOutData
mov a,#255
call F_wait_u
call putOutData
mov a,#255
call F_wait_u
call putOutData
mov a,#255
call F_wait_u
ret
; die Sende-Funktion
putOutData:
mov R0,#18 ; zur indirekten Adressierung
mov R1,#SENDDATA0 ; Zeiger und Zähler setzen
mainloop: ; Hauptschleife
mov a,@R1 ; Datenwert holen
inc R1 ; Zeiger weitersetzen
rrc a ; niederwertigstes Bit in Carry
jc mainloopsendhigh
setb CU_OUTR ; low-Bit senden
clr CU_OUTB
mov a,#4
mainloop_low_label0:
djnz ACC,mainloop_low_label0
clr CU_OUTR
setb CU_OUTB
mov a,#40
mainloop_low_label1:
djnz ACC,mainloop_low_label1
djnz R0,mainloop ; nächstes Bit holen
ret ; keine weiteren Datenbits
mainloopsendhigh: ; high-Bit senden
setb CU_OUTR
clr CU_OUTB
mov a,#40
mainloop_high_label1:
djnz ACC,mainloop_high_label1
clr CU_OUTR
setb CU_OUTB
mov a,#4
mainloop_high_label0:
djnz ACC,mainloop_high_label0
djnz R0,mainloop ; nächstes Bit holen
ret ; keine weiteren Datenbits
|
Die Funktion zum Errechnen der Daten wurde in diesem Falle
in einen separaten Controller gesteckt, der eine 5x8-Tastenmatrix
überwacht, die das Stellpult bildet. Aus der gedrückten Taste
sollte ein 18 Bit-Datenstrom gebildet werden, der via serieller
Schnittstelle an den Controller mit der Senden-Funktion
übermittelt wird. Die Teilung von Tastenmatrix und Sender
wurde deshalb vorgenommen, um die Anlage bei Bedarf leicht erweitern
zu können.
Die Funktion zum Ermitteln der Daten, die in das Datenfeld
geschrieben werden müssen, hat nun die Aufgabe, eine
|
Nummer - die Weichenadresse - in dieses seltsame dreiwertige
System zu überführen. Dies geschieht am einfachsten, indem man die
Weichennummer immer wieder durch 3 dividiert und den bei jedem Schritt
verbleibenden Rest in die erforderliche Bitkombination überführt:
0=>00, 1=>11, 2=>10
Schneller geht es jedoch, wenn man ein Datenfeld vorher berechnet und
einen größeren Teil der Weichennummer (in diesem Falle der Rest einer
Division durch 27) als Zeiger auf dieses Datenfeld
auffasst:
|
calcAddress:
; Input: Acc Adresse, 0 bis 242 (3^-1)
; Output: Ausgegeben auf R1R0 (10 Bits für 5 Adresspins)
mov b,#27 ; Aufteilen in 2 Teile
div ab
xch a,b ; Rest in A, Ergebnis in B
mov DPTR,#calcAddressData
movc a,@A+DPTR ; Umwandeln des ersten Teils (A0 bis A2)
mov R0,a
mov a,b ; nächster Teil (A3 bis A4)
movc a,@A+DPTR
rr a ; die höchstwertigsten Bits in R0
rr a
push Acc
anl a,#11000000b
orl 0,a
pop Acc ; die beiden übrigbleibenden Bits in R1
anl a,#00000011b
mov R1,a
ret
calcAddressData: ; Daten für 0 bis 26
db 00000000b
db 00000011b
db 00000001b
db 00001100b
db 00001111b
db 00001101b
db 00000100b
db 00000111b
db 00000101b
db 00110000b
db 00110011b
db 00110001b
db 00111100b
db 00111111b
db 00111101b
db 00110100b
db 00110111b
db 00110101b
db 00010000b
db 00010011b
db 00010001b
db 00011100b
db 00011111b
db 00011101b
db 00010100b
db 00010111b
db 00010101b
|
 Die Funktion, die aus den gedrückten Tasten die Daten für die
eigentliche Weichenstellung ermittelt, ist in der Funktionsweise
identisch und wird daher nicht noch einmal aufgeführt, zum
Nachlesen des vollständigen Quellcodes sei auf die Download-Seite
verwiesen. Zur Berechnung des Datenfeldes sei noch folgendes
gesagt: Jede Decoderadresse kann 2 Weichen steuern, daher gehören zu
jeder Decoderplatine 4 Tasten. Damit gibt es 16 mögliche Kombinationen,
die leicht über ein Datenfeld codiert werden können. Da die verwendete
Tastenmatrix 8x5 Anschlüsse hat, lässt sie sich gut in Felder zu je
4 Tasten aufteilen.
Die Funktion, die aus den gedrückten Tasten die Daten für die
eigentliche Weichenstellung ermittelt, ist in der Funktionsweise
identisch und wird daher nicht noch einmal aufgeführt, zum
Nachlesen des vollständigen Quellcodes sei auf die Download-Seite
verwiesen. Zur Berechnung des Datenfeldes sei noch folgendes
gesagt: Jede Decoderadresse kann 2 Weichen steuern, daher gehören zu
jeder Decoderplatine 4 Tasten. Damit gibt es 16 mögliche Kombinationen,
die leicht über ein Datenfeld codiert werden können. Da die verwendete
Tastenmatrix 8x5 Anschlüsse hat, lässt sie sich gut in Felder zu je
4 Tasten aufteilen.
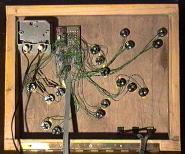
Nebenstehend ist die Innenansicht meines Stellpultes abgebildet. Im Zentrum
des Drahtknäuls ahnt man die Platine, an die die Tasten angeschlossen
werden. Nach unten führt ein Flachbandkabel zum Encoder/Booster, der die
seriell übermittelten Daten an die Decoder ausgibt.
|