Warum RTLinux
Da man zur Datenspeicherung -- dafür ein Flash - ROM zu verwenden, ist auf Dauer unpraktisch -- ohnehin einen Rechner neben der Anlage braucht, kann dieser auch die komplette Schrittmotor - Steuerung übernehmen. Ganz so einfach ist das dann aber doch nicht: schließlich ist die Erzeugung von Schrittmotor - Takten eine 'harte' Echtzeitanwendung. Sind die generierten Takte nicht synchron, so ist an eine präzise Arbeit nicht mehr zu denken.
Die Echtzeit - Fähigkeit hat übrigends nicht das geringste mit der Ausführungsgeschwindigkeit zu tun. Es geht keinesfalls um ein so schnell wie möglich, wie es die als "Realtime" bezeichneten Prioritäten diverser Multitasking - Betriebssysteme nahelegen. Vielmehr liegt das Ziel eines echtzeitfähigen Betriebssystems darin, eine Aufgabe genau rechtzeitig auszuführen, nicht früher und nicht später. Nicht echtzeitfähige Betriebssysteme können diese Rechtzeitigkeit nicht garantieren.
![]()
An dieser Stelle kommt RTLinux in's Spiel: es ist eine Erweiterung für den Standard - Linuxkernel, die sich vollkommen transparent in's System integriert. Alle Linux - Anwendungen laufen weiterhin, ob es nun eine Oracle - Datenbank oder der Lieblings - Texteditor ist. Linux ist ein modernes Multitasking - Betriebssystem mit ausgezeichneten Netzwerkfähigkeiten und einer Unmenge an frei verfügbaren Entwicklungswerkzeugen und Programmbibliotheken.
Inwieweit ist nun RTLinux in der Lage, zur Steuerung
von Schrittmotoren Verwendung zu finden? Und vor allem,
ist es auch von einem Nicht - Guru und Nicht -
Kernelhacker (wie mir ;-) sinnvoll
einzusetzen? Diesen Fragen will diese Seite auf den Grund
gehen. Dazu soll die Installation von RTLinux 3.1 auf
einem SuSE 7.2 System mit Kernel 2.4.4 durchgeführt
und ein einfaches Programm zur Steuerung eines
Schrittmotors über den Parallelport entwickelt
werden.
zurück zum Anfang ![]()
Die Installation
Zunächst ist Linux auf dem Rechner - bei mir ein alter Pentium 133 mit 80 MB RAM, 1.2 GB Festplatte und 100MBit Netzwerkkarte - zu installieren. Bei den begrenzten Ressourcen auf dem Rechner ist es sinnvoll, bei der verwendeten SuSE 7.2 Distribution die Option Minimalsystem mit grafischer X11 - Oberfläche zu wählen, um nicht zuviel Plattenplatz für unnötige Programme zu verschwenden. Bei diesem Minimalsystem muss man hinterher allerdings noch die Netzwerk - Serverkomponenten (ftp-, telnet- rlogin - Deamon, xinetd etc.) hinzuinstallieren.
Nun kann man das System konfigurieren, wie man es für richtig hält. Vor allem sind die Netzwerkdienste einzurichten, da man danach auf Monitor, Maus und Tastatur verzichten und den Rechner in einem Winkel unter dem Schreibtisch verstauen kann. Trägt der installierte Kernel nicht die Versionsnummer 2.4.4 (cat /proc/version), so ist er zu installieren.
Jetzt geht es an die Installation von RTLinux. Zuerst sind die Quellen von RTLinux 3.1 sowie die 2.4.4er Kernel - Quellen herunterzuladen. Da RTLinux als Kernel - Patch ausgeliefert wird, ist unbedingt ein originaler, ungepatchter Kernel von www.kernel.org erforderlich, die Quellen des SuSE - Standardkernels patchen zu wollen ist aussichtslos.
Nun werden die Quellen entpackt:
cd /usr/src/
tar xvzf linux-2.4.4.tar.gz
tar xvzf rtlinux-3.1.tar.gz
Gemäß den Linux - Konventionen ist noch ein
Link von den aktuellen Kernel - Sourcen nach
linux anzulegen:
ln -sf /usr/src/linux-2.4.4
/usr/src/linux
Daraufhin werden die Kernel - Sourcen mit der RTLinux
- Erweiterung gepatcht.
cd /usr/src/linux
patch -p1 <
../rtlinux-3.1/kernel_patch-2.4.4
Die Kernel - Konfiguration ist der nächste
Schritt. Nach 4 gescheiterten Versuchen weiß ich es
genau: für einen 'Uneingeweihten' ist es nahezu
unmöglich, einen lauffähigen Kernel selbst
zusammenzustellen. Irgendetwas vergisst man immer, sei es
eine wichtige Komponente zum Ansprechen der Festplatte
oder ein Modul mit unwichtig klingendem Namen, das so
unwichtig dann doch nicht sein konnte. Es gibt aber einen
guten Trick, dennoch zu einem funktionierenden Kernel zu
gelangen. Bei der Einrichtung wurde darauf hingewiesen,
den 2.4.4er Kernel von SuSE zu installieren. Dieser ist
zwar von SuSE angepasst, aber die Konfigurationsdatei
scheint zum Originalkernel kompatibel zu sein. Diese ist
also als Vorlage zu kopieren:
cp /boot/vmlinuz.config
/usr/src/linux/.config
Mit dieser Vorlage braucht man nur diejenigen Module
abzuwählen, von denen man mit Sicherheit
ausschließen kann, dass man sie jemals braucht.
Dazu zählen Sound, Video, USB, SCSI, zahllose
Netzwerkkarten - Treiber etc. Auszuschalten sind auch
ACPI und der Parallelport - Support. Es ist auch ganz
praktisch, sämtliche wirklich benötigten Module
direkt in den Kernel unterzubringen, weil dann ein Aufruf
von lsmod nur noch die RTLinux - Module
anzeigt.
cd /usr/src/linux
make xconfig
Nun können der Kernel und die ausgewählten
Module übersetzt werden. Das dauert ein Weilchen,
wenn man bei der Abwahl unnötiger Module zu zaghaft
war.
make bzImage
make modules
make modules_install
Als Ergebnis liegt nun ein Kernel - Image in
arch/i386/boot/bzImage und ein neues Module -
Verzeichnis in /lib/modules/2.4.4-rtl/. Um vom
neuen Kernel zu booten, ist dieser an die richtige
Position zu kopieren.
cp arch/i386/boot/bzImage
/boot/rtzImage
Weiterhin ist ein Eintrag beim Bootloader -- hier am
Beispiel von lilo -- zu ergänzen. In die
Datei /etc/lilo.conf gehören diese Zeilen
unter Anpassung des Pfades zur Root - Partition:
|
image = /boot/rtzImage label = rtlinux root = /dev/hda3 |
Damit lilo diese Änderungen an seiner
Konfigurationsdatei auch wahrnimmt, ist er einmal
aufzurufen. Daraufhin kann gebootet werden. Hat alles
funktioniert, steht nun ein neuer Eintrag rtlinux
im Bootmenü, der den neu erstellten Kernel
startet.
lilo
shutdown -r now
Wenn das System erfolgreich hochgefahren ist, kann man sich leicht davon überzeugen, dass der soeben kompilierte Kernel mit RTLinux - Erweiterungen läuft. Ein Aufruf von cat /proc/version sollte nun den Text "Linux version 2.4.4-rtl" ausgeben.
Es bleibt noch das Kompilieren der RTLinux - eigenen
Module, die nicht in die Sourcen des Linux - Kernels
hineinkopiert wurden. Ein Link von den Linux -
Kernensourcen in das RTLinux - Verzeichnis dient dabei
zum Einbinden der Kernelquellen. Bei der Konfiguration
von RTLinux mit make xconfig sind die Vorgaben
sinnvoll, es genügt ein Mausclick auf "Save and
Exit".
ln -sf /usr/src/linux-2.4.4/
/usr/src/rtlinux-3.1/linux
cd /usr/src/rtlinux-3.1
make xconfig
make
make devices
Die Installation ist nun erfolgreich abgeschlossen.
Mit diesen Kommandos (die man sich am besten gleich in
ein Makefile oder ein Shellscript packt) werden die
RTLinux - Module geladen, wovon man sich wieder mit
lsmod überzeugen kann:
cd /usr/src/rtlinux-3.1/
scripts/insrtl
Alle Module stehen jetzt fertig kompiliert zur
Verfügung, und die in
/usr/src/rtlinux-3.1/examples stehenden
Beispiele sollten zur Zufriedenheit funktionieren.
Letztlich sollte jeder, der auch Linux selbst installiert
bekommt, mit RTLinux keine Schwierigkeiten haben.
zurück zum Anfang
Entwicklung unter RTLinux
int init_module(void)
{
...
return 0;
}
void cleanup_module(void)
{
...
}
Meldungen werden nicht auf die Konsole ausgegeben -- wie auch, welche Konsole gehört dem Kernel? -- sondern in den Kernel Ring Buffer geschrieben, wo sie sich mit dmesg anzeigen lassen. Programmseitig steht für die Ausgabe solcher Nachrichten die Funktion rtl_printf() zur Verfügung, die ebenso wie das bekannte printf() parametrisiert wird.
Da diese Kernel - Module mit Root - Rechten ablaufen, können sie auf alle Hardware direkt zugreifen, sind aber auch anfällig für Programmierfehler oder gar Angriffe von aussen. Die übliche Reaktion von RTLinux auf Fehler gleich welcher Art besteht darin, das System sofort anzuhalten. Sollte also Ihr System aus unerfindlichen Gründen stehenbleiben, so ist dies nicht auf Fehler im Linux - Kernel zurückzuführen, sondern Absicht.
Dies ist sicher sinnvoll für Produktivumgebungen, da es besser ist, in einem definierten Zustand zu enden als in einem unvorhersehbaren Chaos aus laufenden und abgeschossenen Modulen und verspäteten Threads. Für die Entwicklung ist dieses Verhalten hingegen lästig und lässt sich über das Laden des debug - Moduls mittels insmod /usr/src/rtlinux-3.1/debugger/rtl_debug.o abstellen (Siehe README im debugger - Verzeichnis von RTlinux).
Die Echtzeitfähigkeit der Threads muss man auch bei der Ein- und Ausgabe berücksichtigen. So ist es zum Beispiel ausgeschlossen, in Echtzeit - Threads Dateien zu lesen oder Netzwerkverbindungen zu öffnen, da deren Ein- und Ausgabefunktionen den Prozess unvorhersagbar lange blockieren. Die einfachste Art, Daten in einen Echtzeit - Thread zu bekommen oder von ihm auszulesen, besteht in den FIFOs (First In First Out), die bei der Installation als /dev/rtf0 ... /dev/rtfn angelegt wurden. Sie lassen sich von nicht echtzeitfähigen Programmen und Prozessen wie normale Dateien bzw. Geräte ansprechen und von den Echtzeit - Prozessen aus mit rtf_get() und rtf_put() leicht lesen und schreiben.
Inzwischen wurde bereits oft von Echtzeit - Prozessen gesprochen -- doch wie werden diese erzeugt und verwaltet? Ein periodischer RT - Thread, wie er für die Erzeugung von Schrittmotor - Steuersignalen benötigt wird, wird mit pthread_create() erzeugt, mit pthread_make_periodic_np() als periodisch markiert und mit pthread_delete_np() vernichtet. Hat der Thread seine Aufgabe für die jeweilige Periode erfüllt und wartet auf die nächste, so legt er sich mit pthread_wait_np() schlafen.
pthread_t t;
void* rt_thread(void* arg)
{
pthread_make_periodic_np
(pthread_self(), gethrtime(), 5000000);
while(1)
{
rtl_printf("I
am alive!\n");
pthread_wait_np();
}
}
int init_module(void)
{
rtl_printf("Start.\n");
pthread_create(&t, NULL,
rt_thread, (void*) 0);
return 0;
}
void cleanup_module(void)
{
rtl_printf("Stop.\n");
pthread_delete_np(t);
}
zurück zum Anfang
Ansteuerung eines Schrittmotors
Solange ein Muster an den Spulen anliegt, verharrt der Läufer in der aktuellen Position. Daher lässt sich die Drehzahl und die Position eines Schrittmotors sehr exakt bestimmen.
Im einfachsten Falle erfolgt die Ansteuerung mit dem Vollschrittverfahren. Dabei wird die Spannung von Spule zu Spule mit wechselseitiger Polarität weitergeschaltet, wie unten abgebildet.
Das ebenfalls abgebildete Halbschrittverfahren fügt zwischen die beiden Vollschritte noch einen weiteren Schritt ein, in dem beide Spulen stromdurchflossen sind. Dadurch lässt sich die Auflösung des Schrittmotors effektiv verdoppeln. Jedoch steigt der Stromverbrauch, und die Spannung muss ständig am Schrittmotor anliegen, weil der Rotor sonst bei einem halben Schritt in die letzte oder nächste Vollschrittstellung laufen würde.
Bei der Microschritt - Ansteuerung wird das Halbschrittverfahren weiter verfeinert, indem durch Pulsweitenmodulation des Stromes beider Spulen zwischen zwei Vollschritte beliebig viele Zwischenschritte eingefügt werden. Diese Ansteuerung hat jedoch keine große Bedeutung, da die erreichbare theoretisch beliebig hohe Auflösung von der Mechanik des Schrittmotors oft nicht nachvollzogen werden kann.
![]()
Das Ziel der hier vorgestellten Schrittmotor - Ansteuerung ist der Einsatz des Halbschrittverfahrens. Die Beschleunigungs- und Bremskurve soll mit Hilfe einer quadratischen Gleichung
zurück zum Anfang
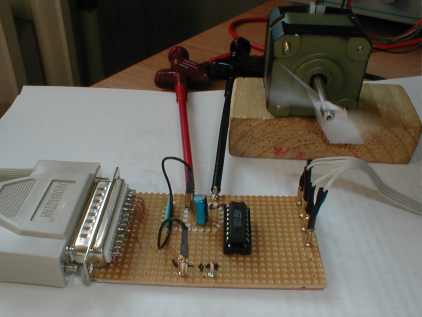
Halbschritt - Ansteuerung

Schaltplan und Aufbau des Testboards
Das Programm
RTL_DIR = /usr/src/rtlinux-3.1
RTLINUX_DIR = /usr/src/rtlinux-3.1/linux
INCLUDE= -I/usr/src/rtlinux-3.1/linux/include -I/usr/src/rtlinux-3.1/include \
-I/usr/src/rtlinux-3.1/include/compat
CFLAGS = -g -D__KERNEL__ -Wall -Wstrict-prototypes -fno-strict-aliasing -pipe \
-mpreferred-stack-boundary=2 -march=i586 -DMODULE -g -D__RTL__ \
-D_LOOSE_KERNEL_NAMES -O2 -I/usr/src/rtlinux-3.1/linux/include \
-I/usr/src/rtlinux-3.1/include -I/usr/src/rtlinux-3.1/include/compat \
-I/usr/src/rtlinux-3.1/include/posix
ARCH = i386
CC = gcc
CXXFLAGS = -D__KERNEL__ -Wall -Wstrict-prototypes -fno-strict-aliasing -pipe \
-mpreferred-stack-boundary=2 -march=i586 -DMODULE -g -D__RTL__ \
-D_LOOSE_KERNEL_NAMES -I/usr/src/rtlinux-3.1/linux/include \
-I/usr/src/rtlinux-3.1/include -I/usr/src/rtlinux-3.1/include/compat \
-I/usr/src/rtlinux-3.1/include/posix -fno-exceptions -fno-rtti
all:
clean \
stepper.o
modinst:
@echo "installiere Kernel-Module für RT-Linux"
(cd /usr/src/rtlinux-3.1/; scripts/insrtl)
clean:
@echo "Entferne alte Objektdateien:"
rm -f *.o
Nun zum Programm. Zunächst werden einige Header
eingebunden, statische Definitionen definiert und globale
Variablen festgelegt. Die Schrittmotor - Bewegung
gliedert sich in 4 aufeinanderfolgende Zustände: bei
STATUS_STOP bewegt sich nichts, bei STATUS_SPEEDUP wird
beschleunigt, bei STATUS_RUNNING wird die Geschwindigkeit
gehalten und bei STATUS_SPEEDDN wird abgebremst.
Der nun folgende Thread hat die Aufgabe, Daten von /dev/rtf0 einzulesen und gemäß den übergebenen Anweisungen den Status weiterzusetzen und die Beschleunigungs- und Bremskurve zu errechnen. Die Kommandos werden einfach im Klartext an den FIFO geschickt, etwa in der Konsole mit "echo start > /dev/rtf0" Wer übrigens bei String- und überhaupt allen Operationen auf Arrays oder Puffern Funktionen ohne Angabe einer Maximallänge wie strcmp() statt strncmp() verwendet, braucht sich über Sicherheitslücken und bei unerwarteten Daten abstürzende Programme nicht zu wundern.#include <linux/module.h> #include <linux/kernel.h> #include <linux/version.h> #include <linux/cons.h> #include <asm/io.h> #include <rtl_sched.h> #include <rtl_fifo.h> #include <linux/string.h> // erster Parallelport: 0x378 // zweiter Parallelport: 0x278 #define LPT_PORT 0x278 // Enable-Signal liegt auf D7 des Parallelports #define ENABLE 0x0080 #define STATUS_STOP 0 #define STATUS_SPEEDUP 1 #define STATUS_RUNNING 2 #define STATUS_SPEEDDN 3 // Globale Variablen pthread_t controlthread; pthread_t stepperthread; int status = STATUS_STOP; long changespeed = 0; // Funktionsprototypen void* stepper_control(void* arg); void* stepper_out(void* arg);
Die Veränderung der Geschwindigkeit des Schrittmotors geschieht indirekt über die globale Variable changespeed. Es ist zwar möglich, die Periodendauer des Ausgabe - Threads auch von diesem Steuerthread aus zu verändern, jedoch entstünden dadurch Unregelmäßigkeiten, da der Steuerthread ja nicht weiß, wieviel Zeit seit dem letzten Aufruf des Ausgabethreads vergangen ist.
// Steuer-Thread
void* stepper_control(void* arg)
{
char *buf[1024];
int count = 255;
pthread_make_periodic_np (pthread_self(), gethrtime(), 10000000);
while(1)
{
// Daten vom FIFO einlesen
int l = rtf_get(0, buf, 1024);
// Daten vom FIFO interpretieren
if(l>0)
{
if(strncmp("start",(char *)buf,5)==0 && status == STATUS_STOP)
{
rtl_printf("starting\n");
// Thread starten
pthread_wakeup_np(stepperthread);
// Status weitersetzen
status = STATUS_SPEEDUP;
count = 255;
}
else if(strncmp("emerg",(char *)buf,5)==0 && status > STATUS_STOP)
{
rtl_printf("emergency stop\n");
// Status weitersetzen
status = STATUS_STOP;
}
else if(strncmp("stop",(char *)buf,4)==0 && status > STATUS_STOP)
{
rtl_printf("stopping\n");
// Status weitersetzen
status = STATUS_SPEEDDN;
}
}
// Beschleunigungskurve berechnen (quadratische Gleichung)
if(status == STATUS_SPEEDUP)
{
if(count == 0)
{
status = STATUS_RUNNING;
}
else
{
count=count-1;
changespeed = (count*count*61)+1000000;
}
}
else if(status == STATUS_SPEEDDN)
{
if(count == 255)
{
status = STATUS_STOP;
}
else
{
count=count+1;
changespeed = (count*count*61)+1000000;
}
}
// Warten bis zum nächsten Aufruf
pthread_wait_np();
}
return 0;
}
Dieser Thread hat die Aufgabe, das Bitmuster für die
Bewegung des Schrittmotors auf den Parallelport
auszugeben. Dazu wird ein Zähler verwaltet, der
über eine Modulo 8 - Division als Index auf ein
Datenfeld mit den Bitmustern dient. Steht in der Variable
changespeed ein Wert > 0, so wird die
Periodendauer des Ausgabethreads verändert und die
Variable auf 0 zurückgesetzt.
// Ausgabe-Thread
void* stepper_out(void* arg)
{
// Daten für die Ausgabe der Bitmuster für Halbschrittbetrieb
int cnt = 0;
const int val[] = {0x01,0x05,0x04,0x06,0x02,0x0A,0x08,0x09};
// Thread als periodisch markieren und schlafenlegen
pthread_make_periodic_np (pthread_self(), gethrtime(), 5000000);
pthread_suspend_np(pthread_self());
while(1)
{
// Wenn status auf STOP gesetzt, schlafen legen
if(status == STATUS_STOP)
{
outb(0,LPT_PORT);
pthread_suspend_np(pthread_self());
}
// Auf Änderung der Geschwindigkeit reagieren
if(changespeed>0)
{
pthread_make_periodic_np (pthread_self(), gethrtime(), changespeed);
changespeed = 0;
}
// Bitmuster ausgeben, um den Stepper einen Schritt weiterzusetzen
outb(val[cnt%8]|ENABLE,LPT_PORT);
// Zähler auf das nächste Bitmuster
cnt++;
// Warten bis zur nächsten Ausgabe
pthread_wait_np();
}
return 0;
}
Beim Laden eines Kernel - Moduls mit insmod wird
die init_module()-Funktion vom Modul - Loader
aufgerufen. Daher ist dies die richtige Stelle, um die
beiden Threads zu starten.
int init_module(void)
{
// Hello-Message ausgeben (dmesg)
rtl_printf("Stepper Control is running!\n");
// FIFO 0 (/dev/rtf0) initialisieren
rtf_create(0, 1024*1024);
// Threads initialisieren
pthread_create(&stepperthread, NULL, stepper_out, (void*) 0);
pthread_create(&controlthread, NULL, stepper_control, (void*) 0);
return 0;
}
Beim Entladen eines Moduls mit rmmod wird diese
Funktion aufgerufen. Sie hat die Aufgabe, die Threads zu
stoppen und alle benutzten Ressourcen freizugeben.
void cleanup_module(void)
{
rtl_printf("Stepper Control is shutting down!\n");
// Threads anhalten
pthread_delete_np(stepperthread);
pthread_delete_np(controlthread);
// Enable zurücksetzen
outb(0,LPT_PORT);
// Eingabe-FIFO anhalten
rtf_destroy(0);
}
Das war das vollständige Programm. Man sieht, dass
sich die Komplexität in Grenzen hält - auch mit
nur rudimentären C - Kenntnissen und ohne
große Programmiererfahrung unter Linux kommt man
leicht zu ansprechenden Ergebnissen. Die POSIX -
kompatiblen C - Standardbibliotheken, zu denen sich im
Internet Beispiele für fast jede denkbare
Problemstellung finden lassen, sowie die sehr gut
dokumentierten RTLinux - Funktionen machen eine
Entwicklung mit diesem System zum Vergnügen. Damit
ist RTLinux auch für größere Projekte
geeignet, ich werde also meinen Fräsroboter damit
ansteuern können. Mehr dazu demnächst...zurück zum Anfang
Bibliographie
| www.ostermann-net.de | Details und Erläuterungen zu Schrittmotoren und deren praktischem Einsatz | |
| www.fsmlabs.com | Finite State Machine Labs, Inc - der Maintainer von RTLinux | |
| www.lfbs.rwth-aachen.de/~stefan/Praktikum/WS/Beispiele/rectangle.c | Beispiel zur Ausgabe eines Rechtecksignals auf den Parallelport mit RTLinux | |
| www.linuxdoc.org/HOWTO/Kernel-HOWTO.html | Das Linux Kernel - HOWTO | |
| rtlinux_stepper.zip | Quelltext des Programms | |
zurück zum Anfang |